System
How AutoDex works
Given a candidate generator and a multi-fingered hand, AutoDex executes each candidate, observes its physical outcome, and resets the workspace — producing ground-truth labels with no teleoperator.
No teleoperation, no human in the loop. AutoDex proposes grasps in simulation, validates them on real hardware, and resets itself between trials — running unattended, overnight.
Pick an object — AutoDex generates grasp candidates, then executes them on the real robot. No human in between.
Dexterous grasping requires real-world data, yet existing collection paradigms force a choice between simulation (cheap but contact-unreliable) and human teleoperation (faithful but unscalable). We argue that the underlying obstacle is a structural property of the problem: sim-to-real transfer for grasping is asymmetric — geometric feasibility (IK solvability, collision avoidance, kinematic reachability) transfers reliably from simulation, while contact dynamics (friction, slip, multi-finger force closure) do not.
We present AutoDex, an automated real-world data-collection system that uses simulation to propose geometrically feasible grasps and physical execution with a multi-fingered hand to validate grasp stability. AutoDex closes the full loop without human intervention: it accepts candidates from a generator, localizes the object with dense 20-camera tracking, plans and executes collision-monitored motions, labels lift-and-hold success or failure, actively resets the object for the next trial, and logs each trajectory.
Using AutoDex, we collect 3,593 real-world-validated grasps across the Allegro and Inspire hands on 100 diverse objects, including both successful and failed trials. For a matched 500-trajectory collection, AutoDex requires 10.3 h versus 49.4 h for teleoperation — a 4.8× throughput improvement — and real-world validation raises grasp success from 34% under simulation-only validation to 76%.
Simulation is trustworthy for one half of grasping and useless for the other. AutoDex is built around exactly that split.
So AutoDex lets simulation cheaply propose geometrically-feasible candidates, and makes the real robot the contact oracle that decides which ones actually hold.
Because contact doesn’t transfer, grasps that pass in simulation routinely fail on hardware. Validating each candidate on the real robot is what closes the gap.
Retrieval-execution success across four scene types. The gain holds across material, scene, and weight categories — and is largest in cluttered scenes, where validated grasps still reach 80–90% success.
Given a candidate generator and a multi-fingered hand, AutoDex executes each candidate, observes its physical outcome, and resets the workspace — producing ground-truth labels with no teleoperator.
From candidate to labeled trajectory in ~150 s — generation, selection, execution, and reset all run unattended. Click each stage.
Candidate grasps are generated in simulation inside virtual-obstacle scenes, then pre-filtered under deliberately optimistic settings — keeping every geometrically feasible candidate while discarding the impossible ones cheaply.
Selection allocates the limited real-execution budget across the four scene types, prioritizing candidates that cover the most scene constraints before committing robot time.
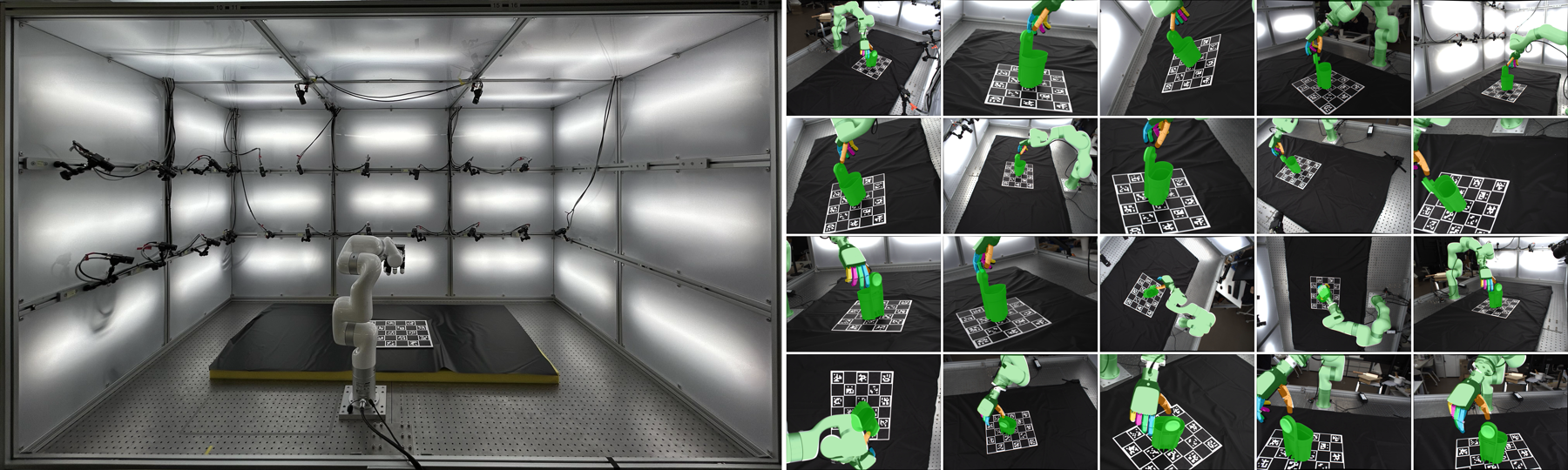
Motion planning produces a collision-free trajectory; a dense 20-camera synchronized RGB rig tracks object and hand throughout each lift-and-hold trial, yielding a ground-truth success/failure label.
A hardware-aware sequential reset restores the workspace between trials — letting the system run fully unattended overnight and collect both successes and failures at scale.
Real-world-validated dexterous grasps — successes and failures — with synchronized multi-view observations and robot-state logs, captured by a 20-view RGB rig across four scene types.
@misc{choi2026autodex,
title = {AutoDex: An Automated Real-World System for Dexterous Grasping Data Collection},
author = {Choi, Mingi and Kim, Gunhee and Kim, Jisoo and Kim, Taeksoo and
Ha, Taeyun and Lim, Jongbin and Joo, Hanbyul},
year = {2026}
}